 封面图来自加零(@jia0kelvin),欢迎大家在Twitter上关注他!
封面图来自加零(@jia0kelvin),欢迎大家在Twitter上关注他!
前言
由于 2020 年初疫情,大一的下学期只能居家上课的缘故,我没有参加去年的省赛。所以,如果不算上学院和学校自己举办的那些比赛的话,今年的国赛还是我第一次打电赛。
以前我很少有机会能够有这么一段时间,为了一个目标集中地学习某样东西,我也没有做过大型项目的经历。所以这一次,我可得好好地参与一番!
从考试完到现在,我们已经准备了快十天。实际上我们从大二的上学期就已经开始准备了,但之前一直都比较懈怠,平日也都在忙其他的东西。真正说得上大家开始同心准备的时候,是从大二下开始的,我们在这个学期确定了飞机的选型,购买相关零件,和搭建好了飞机,并使她完成了遥控飞行。在期末考试结束以后,我们立刻开始继续准备,这一次我们想要先实现受控的自动飞行,于是 OpenMV 就成为了其中的一个很关键的元件。
学到现在,我想效仿 果子酱 的这篇文章(2019 电赛 –OpenMV 学习笔记)那样,在学习到一定程度的时候,写一篇文章,以回顾这段时间学习情况,并且还可以停下来思考一下,接下来又应该准备些什么。
所以,我就写了这篇,希望能给大家一点帮助。
OpenMV简介
OpenMV 是由美国的同名公司 OpenMV, LLC 制造的一个小型、嵌入式、低成本、可拓展的基于 Micro Python 的机器视觉模块,该公司想要其成为“机器视觉世界的 Arduino ” [1] 。简单来说,这就是一个可编程的摄像头 [2] ,或者你可以理解为带摄像头模组的单片机,而且官方还贴心的为你附上了庞大的机器视觉和图像处理的算法库,开箱 10 分钟内就能上手。
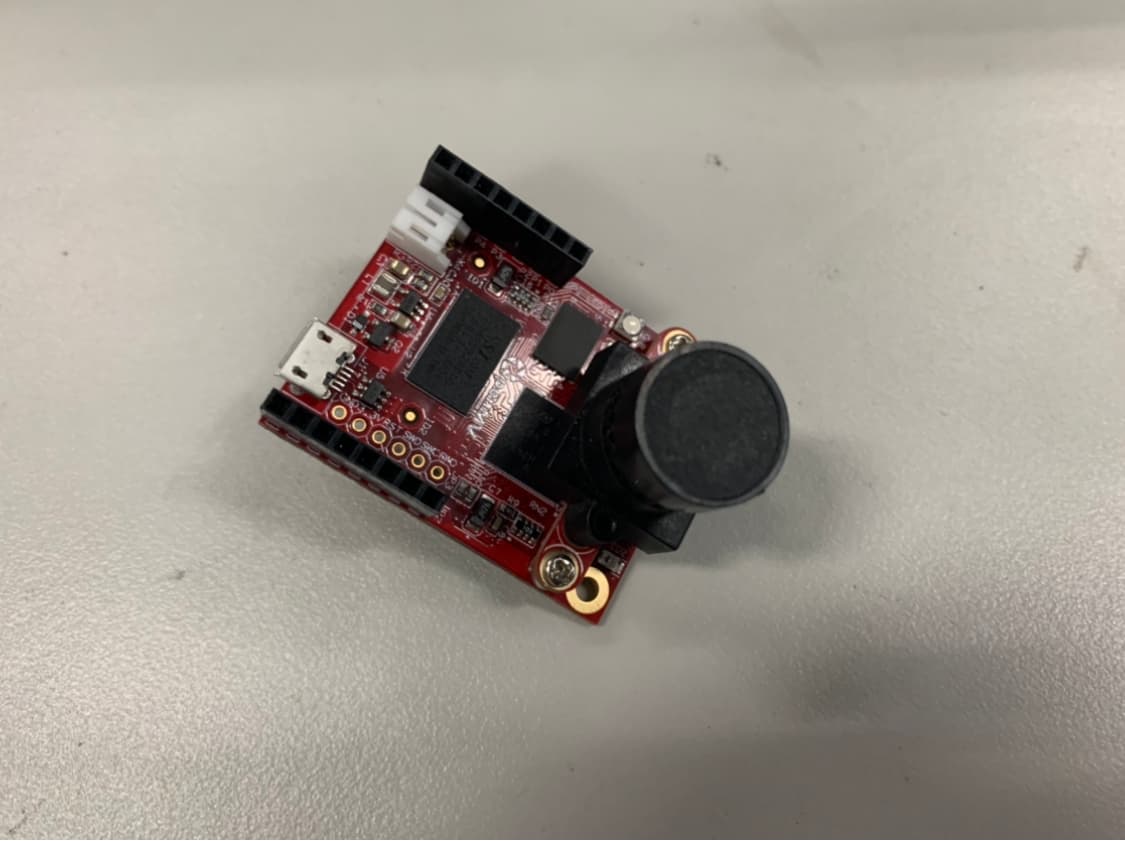 这是我们队买的 OpenMV
这是我们队买的 OpenMV
其实在19年电赛禁用搭载 OpenCV 的树莓派后,简单的图像处理大都只能靠 OpenMV 来做了,当然,不排除有自己造轮子的大佬(
重要的是, OpenMV 是少有的开源硬件——不是像匿名 / 无名那样的假开源—— OpenMV 是真正的硬件结构和软件驱动都开源的商业硬件。既然如此,我们有能力有机会自然也想支持一下,虽然官方的卖得超贵,但也比其他仿造的 OpenMV 质量好得多啊!
总之,正如官方的描述: OpenMV 适合做 DIY 或者低成本的项目,而不适合做复杂的算法工作 [3] 。
所以,对于经费少的大学生和目标功能简单的项目(相对于成熟工业界)而言,用 OpenMV 来做电赛真是再合适不过了。
学习笔记
我们的计划是,首先实现无人机的手动自稳飞行,再实现简单的自动飞行,最后实现可靠的复杂自动飞行——也就是能够完成一道往年的赛题。因此,我们就从 19 年国赛的 B 题开始入手了。
前年国赛的 B 题需要 OpenMV 的地方,大概有四个:
- 识别杆 / 线和测距(视无人机方案而定);
- 识别黄色条形码标记;
- 识别二维码;
- 识别地上的红色起飞标记;
这几项其实蛮简单的,基本上都可以用 OpenMV 的内置函数解决,例如识别颜色标记,可以参考其“色块识别”的例程 [4] ;二维码 / 条形码的识别,也可以参照其“QR Code”和“Bar Code”的相关例程 [5]。
所以, OpenMV 编程多少能算是偏向软件的项目,我有大量的往年源码和例程可以参考。与此相比,我那写 MSP432 的队友才是真的头疼:虽然TI给了很详细的芯片手册和大量例程,但苦于都是英文,并且庞大的内置库函数让人难以下手,而硬件方面又缺少开源的传统,少有往年的源码给我们参考,所以面对这种情况是会感到有些手足无措的。 OpenMV 相比于这个,大量例程让我们能够 10 分钟内上手,可是相当的友好。
参考官方的例程和各位前辈、学长的源码和思路,我将学习到的综合起来,照猫画虎地写了一套我自己的实现。虽然仍有一些瑕疵,但在我的测试中多少还是能完成任务了,希望能给大家一些参考。
注意:因为一些原因,我的写作顺序是 初始化——识别色块——识别条形码和二维码——识别竖杆——测距——储存照片,不过实际上的逻辑还是文章段落的顺序。
初始化
OpenMV 作为带相机模组的单片机,每次启动都需要初始化。我大概摘一部分在这里,思路很简单,看注释就可以了:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# By: Misaka_Clover
import sensor, image, time # 引入OpenMV的三个常用库
import pyb # 引入单片机的库
import math # 以防万一做数学运算
from pyb import LED # 准备LED
from pyb import UART # 准备通信
# 定义各颜色的LED
red_led = LED(1)
green_led = LED(2)
blue_led = LED(3)
# 开启串行通信
# 默认/只能串口3,波特率常用115200或9600
uart = UART(3, 115200)
# 镜头初始化,具体参见官方文档
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(10)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
while(True):
clock.tick()
Light()
img = sensor.snapshot() # 不断地拍照送入Buffer
可以像我这样,自己建立个模版,每次直接调用或者复制过去都行。
我的源码在 这里 。
识别竖杆
这个功能在几分钟前我才调试好,趁着队友们在飞机上测试的时候,我才有时间在旁边把博文写完。
识别竖杆,实际上就是识别黑色的色块。由于上文提到过,这是我最后写的部分之一,所以色块识别请参见后面,这里我们只需要一起看看更准确地识别竖杆的逻辑思路就好。
 不能想着凑合啊喂
不能想着凑合啊喂
根据 B 站这位 UP 的 分享 ,可以看出,在大于 30 cm 的情况下,直接应用官方教程得到的效果非常地不理想。但他们非常的天才,通过“使用被横向裁剪的 VGA 画幅”解决了识别效果不好的问题。 VGA 画幅的影像广,可以探测到更多的区域,但受限于 OpenMV 孱弱的性能,其在这种画幅下的帧率仅有 7 帧左右,远远小于 OpenMV 默认状态下的 42 帧。所以,他们将画幅进行了裁剪,这样不仅能减少干扰,更准确地识别黑杆,而且能够大幅提高帧率至 24 帧左右,一举两得。
不过,这些奇技淫巧也主要是为测距服务的,下面就让我们来看看 OpenMV 如何测距吧。
测距
测量距离,其实按照常理而言,在不使用超声波或者激光雷达这种直接测距模块的前提下,我们至少需要两个摄像头(双目)才能测量出距离。可我们并没有那么土豪,并且用两个摄像头的话,不仅难以协调二者,并且在工程上冗余,既昂贵也不美观。
思路
不过,工程师们是最擅长解决问题的。工程数学告诉我们,即使是 OpenMV 这样的单目摄像头,我们依旧可以通过一个简单比例变换计算出距离。其中的原理是霍夫变换 [7] ,或者,我们可以直接看星瞳科技的教程:如何利用 OpenMV 进行测距 [8] 。
In brief ,“实际长度和摄像头里的像素成反比”,直观一点便是:距离 = 一个常数 / 直径的像素。
所以,识别竖杆的核心思想便是:选取一个已知长度 / 宽度的参考,通过现在已知的距离和参考处的像素情况计算出常数 K 。当实际飞行时已知参考处的像素情况,我们便可以通过之前计算好的比例常数 K ,算出现在与参考物之间的距离。
根据官方的教程和前辈们的代码,我们可以编写如下程序:
# 黑杆测距
K = 1470 # 我们计算出的常数K
black_threshold = (3, 24, -24, -2, -5, 21) # 我们测量出的黑杆阈值
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.VGA) # 设置VGA画幅
sensor.set_windowing(640, 100) # 裁剪窗口,以降低负荷,提升帧率
sensor.skip_frames(time = 500)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
while(code_step == 1):
clock.tick() # 开始计频
blue_led.on() # 指示灯
img = sensor.snapshot()
# 识别黑色色块
blobs = img.find_blobs([black_threshold], area_threshold=400, merge=True)
for blob in blobs:
if len(blobs) > 0:
x = blob[0]
y = blob[1]
width = blob[2]
height = blob[3]
cx = blob[5]
cy = blob[6]
img.draw_rectangle([x, y, width, height]) # rect
img.draw_cross(cx, cy)
# 测距,以不会改变的宽度为参考
Lm = width
length = K / Lm
print("length =", length, "width =", width, "FPS =", clock.fps())
# K = 物体放置的距离 * 打印出的物体像素大小
# K = 30cm * 47(width) = 1410
# K = 30cm * 49(width) = 1470好了,下面让我们来看看效果吧。
效果
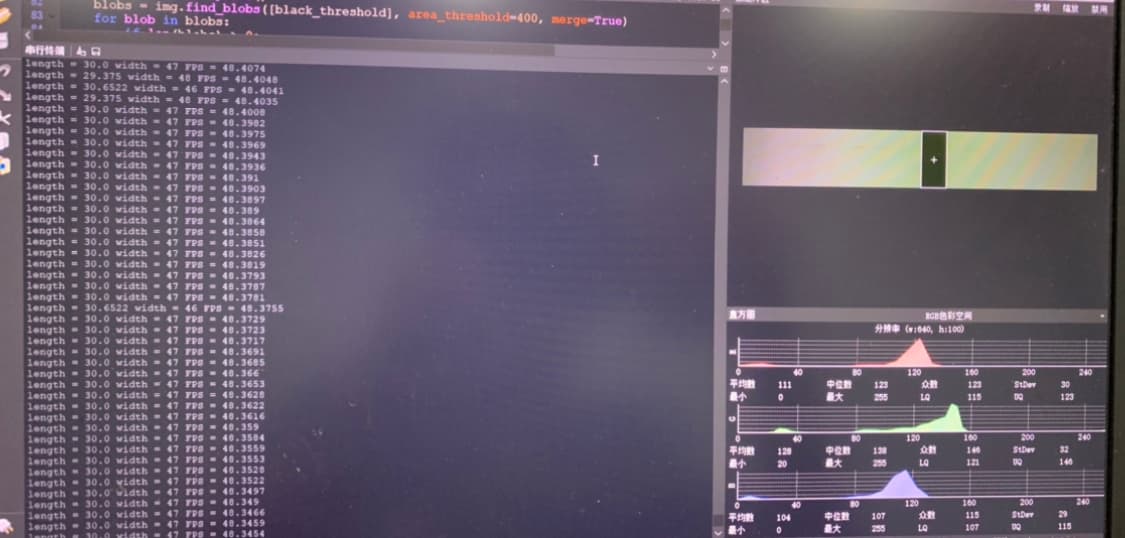 黑杆测距示例
黑杆测距示例
可见,在竖杆识别准确无误的情况下,我在30 cm 处测得的距离非常准确,几乎没有误差,而且帧率 FPS 也很好看。
不过,这只是在“实验室条件下”测得的数据。因为我们的飞机目前只能完成自稳,其定高定点尚未调试好,所以还没办法将 OpenMV 搭载在上面,也暂时无法测试这些方案的实际效果。但考虑到这些方案都是前辈们在国赛中使用过的,所以,想来效果应该也不错吧。
识别竖杆和测距的源码我就没有单独整理出来了,大家想参考的话,可以来看看我现在的 主函数 。
识别色块
对于色块识别,从现成的色块阈值测量工具,到色块识别丰富的内置函数和其较高准确率,都可以看出 OpenMV 的官方在这方面花费了很多精力优化。
整个流程并不难,我简略地说下吧:
选择阈值
先将我们需要识别的颜色放在 OpenMV 的下方,并使用 sensor.snapshot() 函数拍照,创建图像对象,并将其送入缓冲区(Buffer)。
然后,按照 官方的教程,打开 OpenMV IDE 中内置的“阈值选择工具”(Threshold Editor),再如下图一样,通过滑动滑块将目标颜色选出即可:
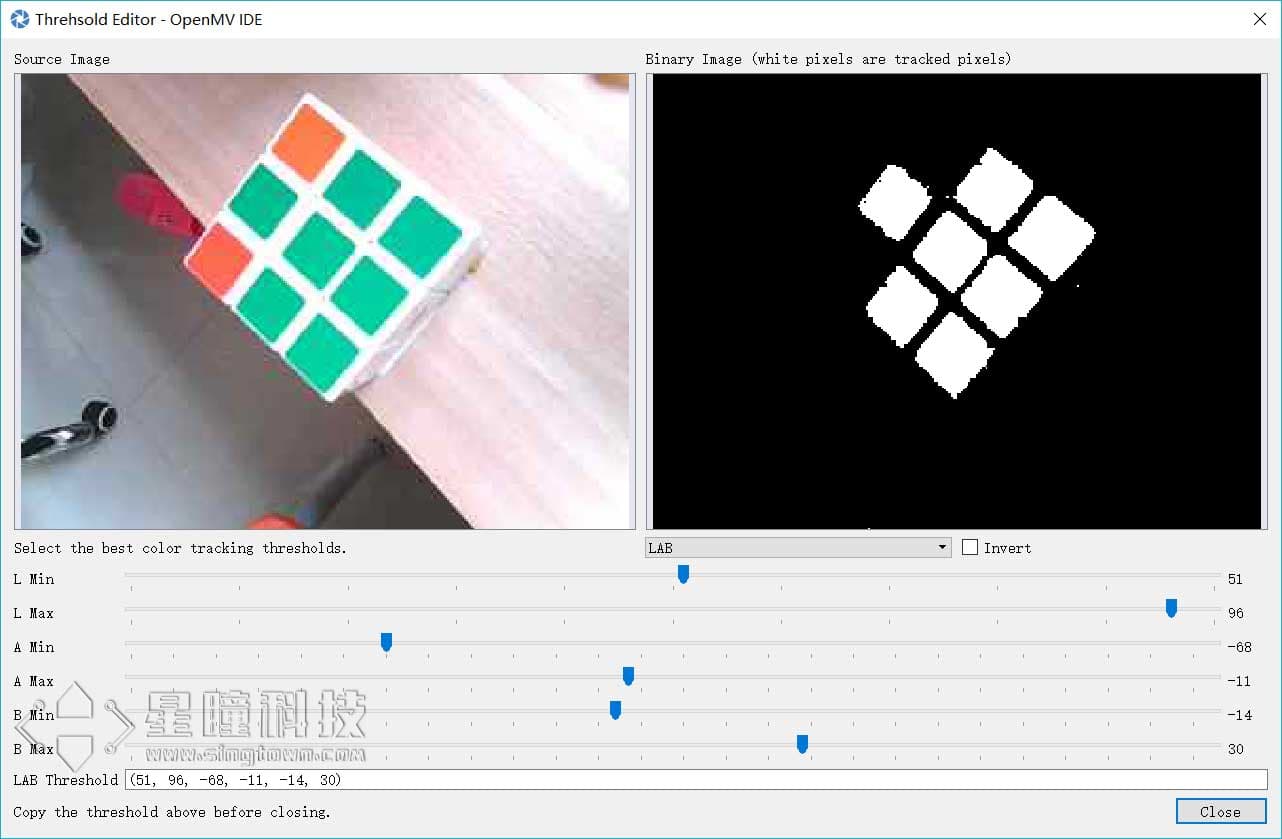 “阈值选择工具”(Threshold Editor)示例图,来自 OpenMV 官方教程
“阈值选择工具”(Threshold Editor)示例图,来自 OpenMV 官方教程
选择出阈值以后,我们会得到一个元组,就是上图中的 LAB Threshold ,这个元组表示 (minL, maxL, minA, maxA, minB, maxB) ,代表了颜色空间 / 颜色标准 LAB 的最大值和最小值。(注意:OpenMV 使用的颜色空间并非 RGB !)
调用 find_blobs 函数
这个函数的参数有些多:
image.find_blobs(thresholds[, invert=False[, roi[, x_stride=2[, y_stride=1[, area_threshold=10[, pixels_threshold=10[, merge=False[, margin=0[, threshold_cb=None[, merge_cb=None]]]]]]]]]])看起来相当的复杂,对吧?
不过按照前辈的经验,我们只需要使用这些参数就可以了,若我们的阈值名为 green_threshold ,则可写为:
red_blobs = img.find_blobs([green_threshold], area_threshold=100, merge=True, roi=(120,0,80,240))这行我们将函数的结果赋给 red_blobs 对象,第一个参数 thresholds 是阈值,,它必须是元组列表,你可以在其中送入多个阈值,以识别多种颜色;第二个参数 area_threshold 规定了色块的最小像素,若小于此值,则会被当作噪声过滤掉;第三个参数 merge 为 True 的时候,可以合并所有没有被过滤掉的色块,他们的边界矩形互相交错重叠;第四个参数 roi 表示感兴趣区域的矩形元组 (x,y,w,h) ,如果未指定,ROI 即整个图像的图像矩形,其他操作的范围也仅限于 roi 区域内的像素。至于其他的参数,可以参考 OpenMV 官方文档,这里就不再详述了。
当我们得到返回的色块对象以后,可以在每一帧图像上都用循环 for 将我们需要的信息返回:
if green_blobs:
for blob in green_blobs:
x = blob[0] # 色块在左上角的x值
y = blob[1] # y值
width = blob[2] # 宽
height = blob[3] # 高
cx = blob[5] # 中心位置的x坐标
cy = blob[6] # y坐标
color_code = blob[8] # 返回一个32位二进制数字
# 上述变量的详细释义请参照注释和官方文档
# 画出边框与中心十字
img.draw_rectangle([x, y, width, height])
img.draw_cross(center_x, center_y)这里我们重点看一下 blob[8] :
“返回一个 32 位的二进制数字,其中为每个颜色阈值设置一个位,那么颜色阈值不同的多个色块就可以合并在一起了。 您可以用这个方法以及多个阈值来实现颜色代码跟踪,您也可以通过索引 [8] 取得这个值。”
看不懂吗?没关系,当时我看这个也看不懂,直到我看到了一个例程 [6] 。这位UP想要识别多种搭配在一起的颜色,于是他这样使用 color_code :
red_threshold = (58, 40, 77, -46, 72, 28) # 红色颜色阈值
green_threshold = (39, 93, -71, -28, -22, 67) # 绿色颜色阈值
blue_threshold = (30, 59, 101, -53, -71, -21) # 蓝色颜色阈值
# 程序的核心部分:
red_color_code = 1 # code = 2^0 = 1 = 0001H
green_color_code = 2 # code = 2^1 = 2 = 0010H
blue_color_code = 4 # code = 2^2 = 4 = 0100H
black_color_code = 8 # code = 2^3 = 8 = 1000H
# 红色、绿色、蓝色和没有识别到的,对应着2的幂次
blobs = img.find_blobs([red_threshold,green_threshold,blue_threshold], area_threshold=200, merge=True, roi=(5,55,50,73))
if blob_left:
for blob in blob_left:
x = blob[0] # 赋值官方给的色块对象
y = blob[1]
width = blob[2]
height = blob[3]
center_x = blob[5]
center_y = blob[6]
color_code = blob[8]可见,他定义了三个阈值,并且同时使用 find_blobs 函数寻找合并的色块,取返回的 color_code 值。
如果色块是红色加绿色,则返回的 color_code = 0011H ,即 color_code 等于 3 ;同理,如果色块是绿色加蓝色,则返回的 color_code = 0110H ,即 color_code 等于 6 。最后对 color_code 进行判定,则可知道色块为哪些颜色的组合。
需要注意的是,色块最原始定义的 color_code 需要是 2 的幂次方,这样才能保证组合后色块的 color_code 能被还原。
效果
不好意思,我的 IDE 等都在另外一台工作的电脑上,所以只能先用照片凑合一下,见谅。
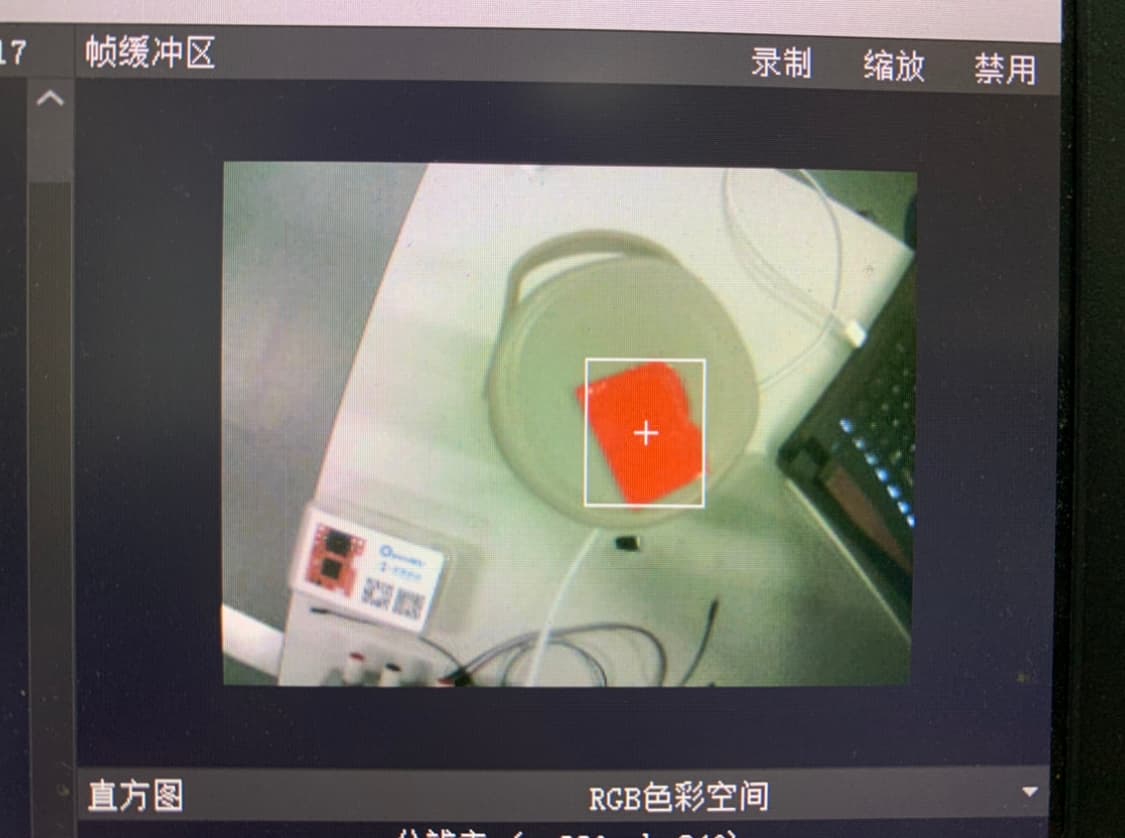 色块识别示例
色块识别示例
细心点会发现,下方盒子上的红色并没有被识别,原因有两点:
- 我设定了
area_threshold大小阈值参数,所以小色块会被滤除; - 我划定了
roi的区域,虽然我并没有把区域在图像上显示。
差不多就是这样了,而我参考的大佬源代码我抄录在自己的GitHub上了,点此即达。
识别条形码和二维码
思路
OpenMV 对条形码(BarCode)和二维码(QR Code)的识别和读取都内置了相关函数,在识别之前,我们需要先找到目标码:
# 条形码的识别
img = sensor.snapshot()
bar_code = img.find_barcodes()# 二维码的识别
img = sensor.snapshot()
img.lens_corr(1.8) # 镜头畸变矫正,官方认为1.8的强度参数对于2.8mm镜头来说是不错的。
QR_code = img.find_qrcodes()分别调用这两个函数我们就能够找到目标码,并将它们分别赋给变量。接下来,我们可通过 rect() 函数,为识别到的码标出边框,使其在 IDE 中更加明显:
# 画出矩形边框
img.draw_rectangle(xx_code.rect(), color = (255, 0, 0))
# xx_code代表上述任一码至于识别它们的内容,我们可以用如下函数得到:
code_means = xx_code.payload()
print("code_means =", code_means)然后其他的操作就完全靠自己发挥啦,比如根据码的内容选择执行分支什么的。
效果
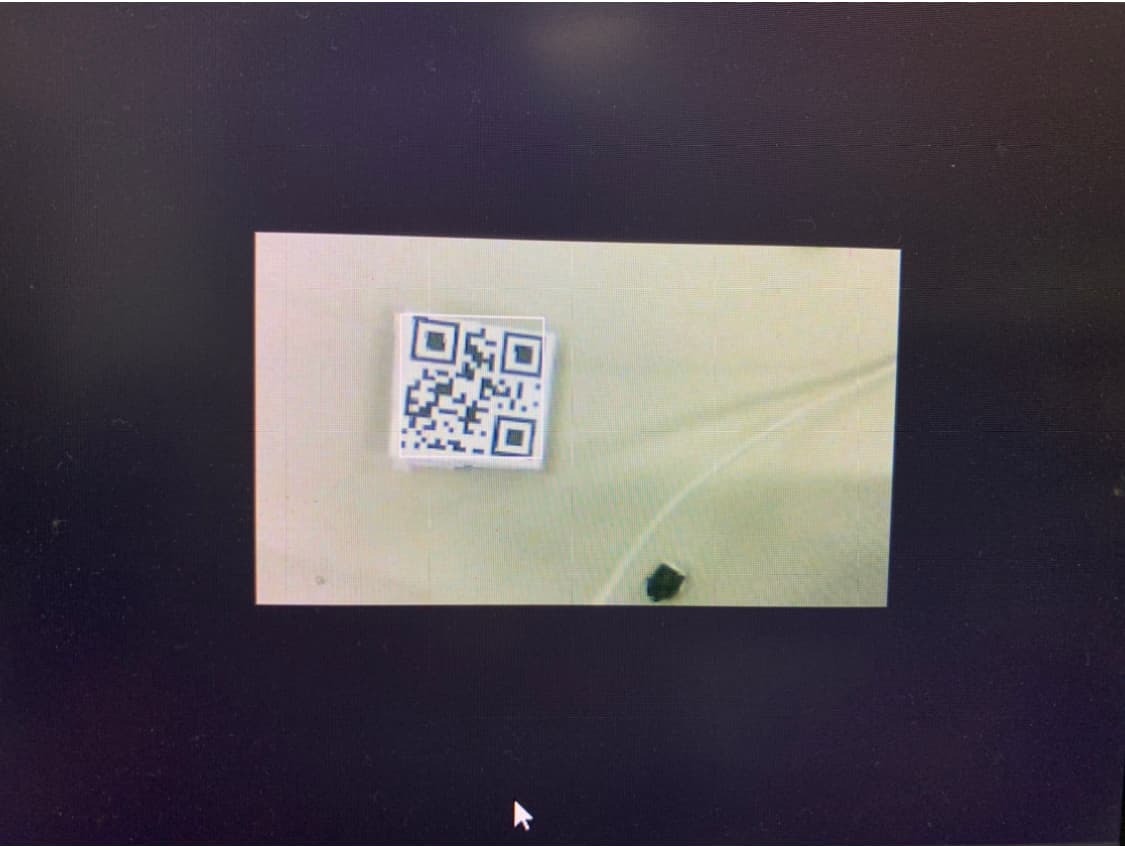 二维码识别示例
二维码识别示例
源码请参见 这里 。
拍摄并储存照片
首先贴出官方的例程: snapshot 保存图片 。
可见,我们通过 sensor.snapshot().save() 函数,将送入缓存中的图像保存在SD卡中。
代码如下:
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 500)
img = sensor.snapshot()
img.save("QR_code_", 1, ".jpg")
print("Done")后记
虽然题目是七日,到现在也已经过了十余日了。
因为在写这篇博文的同时,一边要学习其他新的策略,例如巡线;一边又需要参与到项目中去,根据实际的进度做一些调整,所以写了好些天,想来标题不如改名为“学习 OpenMV 的七八九十日”吧(
开始写的时候,我对其中的一些策略还不太满意,也在边写边改。到写完的时候,情况变化很大,或许到现在我才能说我是真正地掌握了这些吧,而不再是像刚开始时候那样,对着官方例程和别人的代码照猫画虎了。
现在我这里的进展还算是顺利,可我队友们,他们那里真的,真的太难了。
跟硬件打交到可不容易,至少我是这么认为的。学习 OpenMV ,官方给出了完备的函数和示例,从 Micro Python 到单片机的 pyb 库都有着详细的文档,中华区的代理商还贴心地将其中最重要的部分翻译为中文, GitHub 上还能找到往年的前辈开源出的项目源码。这样一来,要文档有文档,要实例有实例,想做项目还有完备的源码可以参考,哪怕是一头猪都不可能学不会。
但我的两位队友,他们就不像我这么容易了。
我们以往只是按部就班地学习,接触过一点点单片机,比如 51 之流,或者像我一样折腾过 Arduino 那种最简单的玩具单片机,连 STM32 都没怎么用过。现在直接使用 TI 公司赞助的 MSP432 ,难度自然不小。并且,由于我们选用的芯片不常出现在电赛中,所以我们没有往年的参考源码,没有例程,也缺乏相关资料的帮助,唯一有的,只是配套的芯片手册而已。但他们还是对着全英的芯片手册从头开始啃,下载了 TI 官网的各种函数实例挨个地看,而我我真的很佩服他们。
最开始的时候,我们什么都不了解,分工也只是三人在飞控、视觉和主控传感器里各选了一部分而已。那时我们普遍认为视觉和飞控都很难,身为队长,我当然不好意思避重就轻,而且对机器视觉比较感兴趣,所以我能负责视觉这部分也算是他们照顾我。
我这段时间常常在想:要是回到最开始各选分工的时候,我们能清楚的知道这些分别代表着什么,它们的难易程度又如何,让我们再来选,我是会迎难而上,选最难的飞控 / 主控,还是依旧选“较为简单”的视觉呢?我不知道。要是换做是我来做飞控 / 主控,我能做到像他们这种程度吗?我不知道——大概不行吧。
但现在,我们在这上面遇到了难题,进度已经卡住好久了,我却只能做做最基本的调试飞机的工作,帮不上什么忙…… 而且他们遇到困难的部分原因,也是因为我在最开始的方案没选好——我应该选更常见的芯片的。如果当时选的是另外一种方案,或许我们就会顺利得多,不会卡在这里了。
我有些愧疚,特别是想到之前他们开始遇到问题的时候,我还想得很简单,去指手画脚,而现在却什么忙都帮不上……
有时候又在想,如果当时我没有选择无人机这个方向,我们的结果会更好呢?
谁知道呢?
反正我只知道,在我看到 这个视频 的时候,我脑子里就只剩下无人机了。
希望我们接下来能够一切顺利吧。
附录
这里照常附上KaTeX公式代码:
# 原理公式
Lm * Bpix = \frac{Rm * Apix}{tan(a)}详情请参见 KaTeX 文档 [9]。
参考资料
[1] OpenMV 官网(英文):https://openmv.io
[2] OpenMV 文档:https://singtown.com/openmv/
[3] OpenMV 教程:https://book.openmv.cc
[4] “色块识别”例程:https://book.openmv.cc/image/blob.html
[5] “ QR Code”和“ Bar Code”例程:https://book.openmv.cc/image/code.html
[6] openmv 物块颜色及色环及二维码识别(from LJTYLJ):https://www.bilibili.com/video/BV1b7411m7Pc
[7] Hough transform:https://en.wikipedia.org/wiki/Hough_transform
[8] 如何利用 OpenMV 进行测距:https://book.openmv.cc/image/ranging.html
[9] KaTeX文档:https://katex.org/docs/supported.html
其他很有帮助的资料
果子小酱的 2019 年电赛OpenMV源码:https://github.com/cwxyr/nuedc-2019-openmv
颜色展示工具:https://www.colorhexa.com
颜色转换工具:https://www.colortell.com/colortool
草料二维码生成:http://cli.im/